























脈沖延遲時(shí)序控制
雙腔氣體激光放電同步控制系統(tǒng)
1,、概述
雙腔氣體激光放電同步控制系統(tǒng)主要根據(jù)中國科學(xué)院光電研究院設(shè)計(jì)任務(wù)進(jìn)行研制,,該系統(tǒng)提供兩路可調(diào)延遲的脈沖輸出信號,,并且能夠?qū)Ψ答伒膬陕访}沖信號進(jìn)行時(shí)間間隔的準(zhǔn)確測量,以便調(diào)節(jié)輸出脈沖信號的延遲時(shí)間,,從而得到用于雙腔放電的兩路可調(diào)延時(shí)低抖動脈沖觸發(fā)信號。
系統(tǒng)指標(biāo):
重復(fù)頻率:1——4KHz
抖動控制精度:±5ns
延時(shí)控制范圍:20ns——1μs
延時(shí)分辨率:3ns
2,、系統(tǒng)組成
雙腔氣體激光放電同步控制系統(tǒng)主要由上位機(jī),、高速數(shù)據(jù)采集卡、脈沖信號發(fā)生器,、脈沖信號延遲器,、脈沖信號整形器等組成,組成框圖如圖1所示,,其中P1和P2為兩路輸出脈沖信號,,PF1和PF2為兩路反饋信號,。
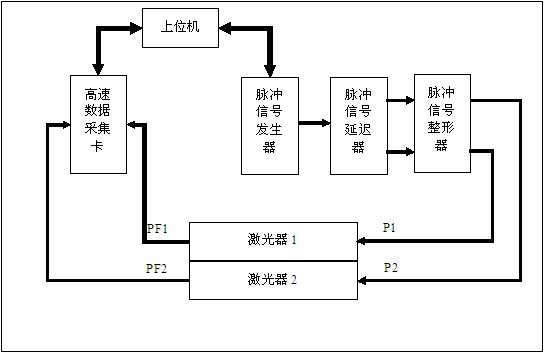
圖1 雙腔氣體激光放電同步控制系統(tǒng)組成框圖
3,、工作原理
雙腔氣體激光放電同步控制系統(tǒng)的簡要工作原理如下。如圖1所示,,首先通過上位機(jī)設(shè)置輸出脈沖信號的頻率與時(shí)間延遲,、輸入脈沖的時(shí)間間隔,然后通過脈沖信號發(fā)生器產(chǎn)生兩路脈沖信號,,由脈沖信號延遲器對兩路信號進(jìn)行時(shí)間延遲,,后通過脈沖信號整形器完成輸出脈沖信號的上升沿整形以及阻抗匹配,后兩路脈沖信號P1和P2分別輸入到指定的激光器系統(tǒng),;兩路反饋信號PF1和PF2通過高速數(shù)據(jù)采集卡和上位機(jī)完成兩路反饋信號的采集與延遲時(shí)間計(jì)算,,如果采集到的延遲時(shí)間與設(shè)定時(shí)間不一致,則調(diào)節(jié)兩路輸出脈沖的延遲時(shí)間,,直到兩路反饋信號的延遲時(shí)間與設(shè)定時(shí)間一致時(shí)停止,。下面對各部分工作原理進(jìn)行詳細(xì)介紹。
3.1上位機(jī)
上位機(jī)主要由計(jì)算機(jī)和相應(yīng)軟件組成,,用來控制高速數(shù)據(jù)采集卡和脈沖信號發(fā)生器,。
3.2脈沖信號發(fā)生器
脈沖信號發(fā)生器主要由單片機(jī)、FPGA,、DDS等組成,,主要完成兩路脈沖信號的產(chǎn)生、脈沖寬度以及頻率的設(shè)置,。
3.3脈沖信號延遲器
3.3.1模擬與數(shù)字相結(jié)合
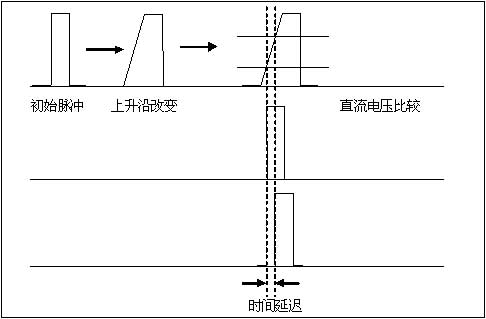
圖2 模擬與數(shù)字相結(jié)合脈沖信號延遲器原理圖
脈沖信號延遲器可以采用模擬與數(shù)字相結(jié)合的方法,,如圖2所示,首先脈沖信號經(jīng)過上升沿延遲電路,,使脈沖的上升沿斜率改變,,然后由直流電壓和脈沖進(jìn)行比較得到延遲的兩路輸出脈沖。采用該方法控制脈沖延遲精度高,、可擴(kuò)展性強(qiáng),,但是電路結(jié)構(gòu)復(fù)雜,。
3.3.2純數(shù)字方式
純數(shù)字方式脈沖信號延遲器如圖3所示,工作原理如下:脈沖信號發(fā)生器輸出兩路脈沖信號,,分別進(jìn)入兩路延遲芯片,,通過單片機(jī)對兩路延遲芯片分別進(jìn)行控制,脈沖信號發(fā)生器輸出的兩路脈沖信號的時(shí)間間隔可以設(shè)定為100ns的整數(shù)倍,,精度為1ns,,延遲芯片的延遲范圍為0~100ns,精度為1ns,,步進(jìn)為1ns,,這樣就可以實(shí)現(xiàn)0~1μs的準(zhǔn)確時(shí)間延遲。
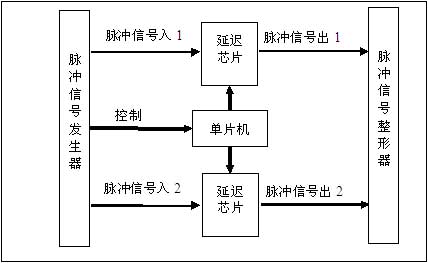
圖3 純數(shù)字方式脈沖信號延遲器原理圖
3.4脈沖信號整形器
脈沖信號整形器主要由濾波器和上升沿加速器組成,,用來完成輸出阻抗的匹配以及脈沖信號上升沿的加速,。
3.5高速數(shù)據(jù)采集卡
高速數(shù)據(jù)采集卡主要完成反饋信號的采集。本設(shè)計(jì)所用采集卡采樣率為1Gsa/S,等效采集速率為4Gsa/S,,以滿足2ns分辨率的要求,。
3.6控制算法
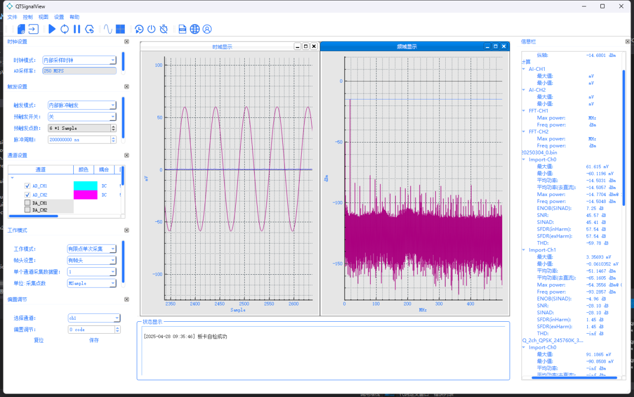
3.7上位機(jī)界面
4、難點(diǎn)及解決方案
4.1上位機(jī)與高速數(shù)據(jù)采集卡和脈沖信號發(fā)生器的控制
上位機(jī)通過軟件對高速數(shù)據(jù)采集卡和脈沖信號發(fā)生器進(jìn)行控制,,這里面除了C語言的技術(shù)外還需要對Windows的底層具有深刻的理解,,能夠?qū)煞N設(shè)備進(jìn)行穩(wěn)定、可靠的控制具有一定難度,,另外輸入信號目前不能確定,,并且信號的抖動性、上升沿,、辨別方式均不能確定,,所以和系統(tǒng)聯(lián)調(diào)時(shí)比較復(fù)雜。我公司從2004年開始使用上位機(jī)對高速數(shù)據(jù)采集卡以及信號發(fā)生器進(jìn)行控制研究,,目前能夠穩(wěn)定可靠的控制NI,、固緯、普源等公司生產(chǎn)的采集卡,,產(chǎn)品能夠滿足工業(yè)場合使用,。
4.2脈沖信號延遲器分辨率與抖動
由于脈沖信號延遲器的分辨率為3ns,對電路所用元器件以及制板布線提出很高要求,,否則輸出脈沖信號會發(fā)生抖動,。脈沖信號延遲器主要仿制泰克公司的AFG3000系列信號發(fā)生器,電路成熟,,設(shè)計(jì)人員經(jīng)驗(yàn)豐富,,能夠設(shè)計(jì)出滿足要求的延遲器。
5脈沖延遲時(shí)序控制系統(tǒng)試驗(yàn)
5.1兩路脈沖信號延遲試驗(yàn)
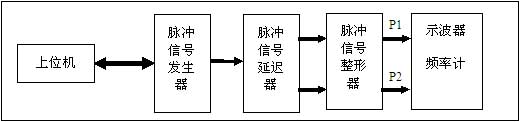
圖4 脈沖信號延遲試驗(yàn)原理圖
兩路脈沖信號延遲試驗(yàn)原理如圖4所示,,通過上位機(jī)設(shè)置兩路輸出脈沖信號的頻率,、脈寬,、延遲時(shí)間,由示波器和頻率計(jì)對輸出脈沖信號進(jìn)行測試,,主要測試指標(biāo)為延遲精度,、上升沿時(shí)間、頻率準(zhǔn)確度,、波形抖動等,。
5.2兩路高速數(shù)據(jù)采集試驗(yàn)
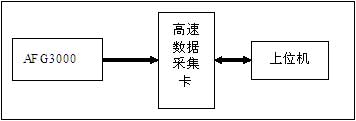
圖5 兩路高速數(shù)據(jù)采集試驗(yàn)原理圖
兩路高速數(shù)據(jù)采集試驗(yàn)原理如圖5所示,由信號源AFG3000輸出兩路延遲可調(diào)脈沖信號,,通過采集卡由上位機(jī)進(jìn)行數(shù)據(jù)讀取與延遲時(shí)間計(jì)算,,以測試高速數(shù)據(jù)采集卡與上位機(jī)的采集精度與穩(wěn)定度。
5.3采集,、輸出聯(lián)調(diào)試驗(yàn)
采集,、輸出聯(lián)調(diào)試驗(yàn)原理如圖6所示,當(dāng)上位機(jī)設(shè)置的脈沖延遲時(shí)間與采集時(shí)間一致時(shí),,輸出脈沖信號的延遲時(shí)間保持不變,;不一致時(shí),,輸出脈沖信號的延遲時(shí)間根據(jù)設(shè)置要求進(jìn)行改變,,該試驗(yàn)主要測試整套系統(tǒng)的工作協(xié)調(diào)性以及準(zhǔn)確性。
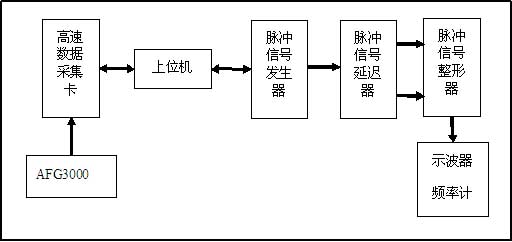
圖6 采集,、輸出聯(lián)調(diào)試驗(yàn)原理圖
5.4與激光系統(tǒng)聯(lián)調(diào)
5.4.1開環(huán)調(diào)試
檢測系統(tǒng)加上放電腔負(fù)載后的開環(huán)傳輸特性。
5.4.2閉環(huán)調(diào)試
當(dāng)開環(huán)調(diào)試試驗(yàn)均完成并且滿足要求時(shí)進(jìn)行系統(tǒng)聯(lián)調(diào),,如圖1所示,。進(jìn)行閉環(huán)調(diào)試,確定控制算法的佳參數(shù),,終達(dá)到系統(tǒng)高重頻,、低抖動特性。
6,、結(jié)論
雙腔氣體激光放電同步控制系統(tǒng)設(shè)計(jì)方案可行,,試驗(yàn)論證充分,可按此方案進(jìn)行研制,。
該系統(tǒng)與激光系統(tǒng)聯(lián)調(diào)時(shí)比較復(fù)雜,,工作量大,可能需要反復(fù)的修改調(diào)節(jié)方案,。
7,、研發(fā)計(jì)劃
詳細(xì)研發(fā)計(jì)劃如下:
|
研發(fā)內(nèi)容 |
時(shí)間周期 |
|
工作具體分工、接口分配 |
1~2周 |
|
設(shè)計(jì)電路,、設(shè)備購買 |
2~3周 |
|
電路調(diào)試,、軟件編寫,、箱體加工 |
3~4周 |
|
系統(tǒng)單機(jī)測試、軟硬件修改 |
4~6周 |
|
與放電腔聯(lián)調(diào) |
|
8,、經(jīng)費(fèi)預(yù)算
|
序號 |
項(xiàng)目 |
價(jià)格(萬元) |
備注 |
|
一 |
硬件成本費(fèi) |
|
|
|
1 |
工控機(jī) |
2 |
|
|
2 |
4 |
|
|
|
3 |
信號發(fā)生器 |
3 |
|
|
4 |
信號延遲器 |
1 |
|
|
5 |
脈沖整形器 |
1 |
|
|
6 |
機(jī)箱 |
1 |
|
|
|
小計(jì) |
12 |
|
|
二 |
軟件費(fèi)用 |
|
|
|
1 |
上位機(jī)軟件 |
8 |
|
|
2 |
單片機(jī)軟件 |
2 |
|
|
|
小計(jì) |
10 |
|
|
三 |
調(diào)試費(fèi)用 |
16.0 |
|
|
四 |
稅(5%的稅) |
2 |
|
|
|
合計(jì) |
40 |
|
-

QT1230
大支持4通道同步采集 高5GSPS采樣率/單通道 2.5GSPS采樣率/2通道 1.25GSPS采樣率/4通道
-

VPX-FT6287
坤馳科技VPX-FT6287是一款6U VPX主控板,,采用FT2000+/64處理器平臺,板貼128GB內(nèi)存,,板上可擴(kuò)展1個M.2 NVME接口,,前面板支持2路10G光口,板上可選國產(chǎn)PCIE擴(kuò)展橋片
-

ADQ7DC-PXIe總線直流耦合采集卡
1/2通道,;14bit分辨率,;10GSPS采樣率;3GHz模擬輸入帶寬及4GB板載內(nèi)存
-

ADQ33-PCIe總線直流耦合采集卡
2通道,;12bit分辨率,;1GSPS采樣率;1GHz模擬帶寬及8GB內(nèi)存,;直流耦合,;OCT專用數(shù)字化儀

