


















超帶寬MIMO通信測試系統(tǒng)
超帶寬MIMO通信測試系統(tǒng)
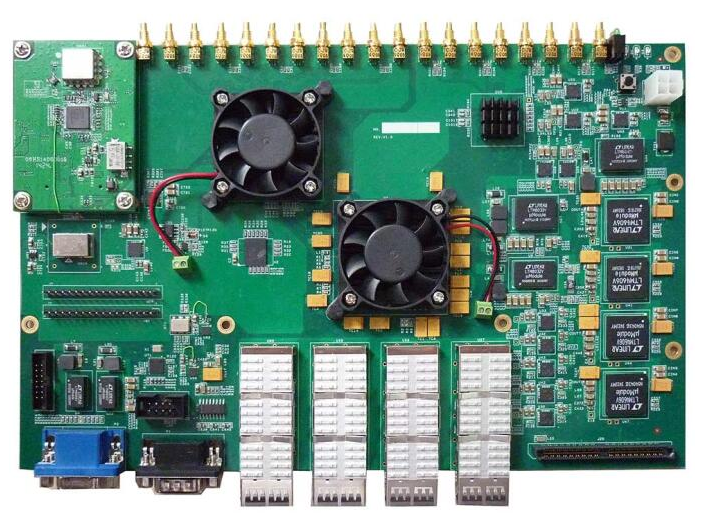
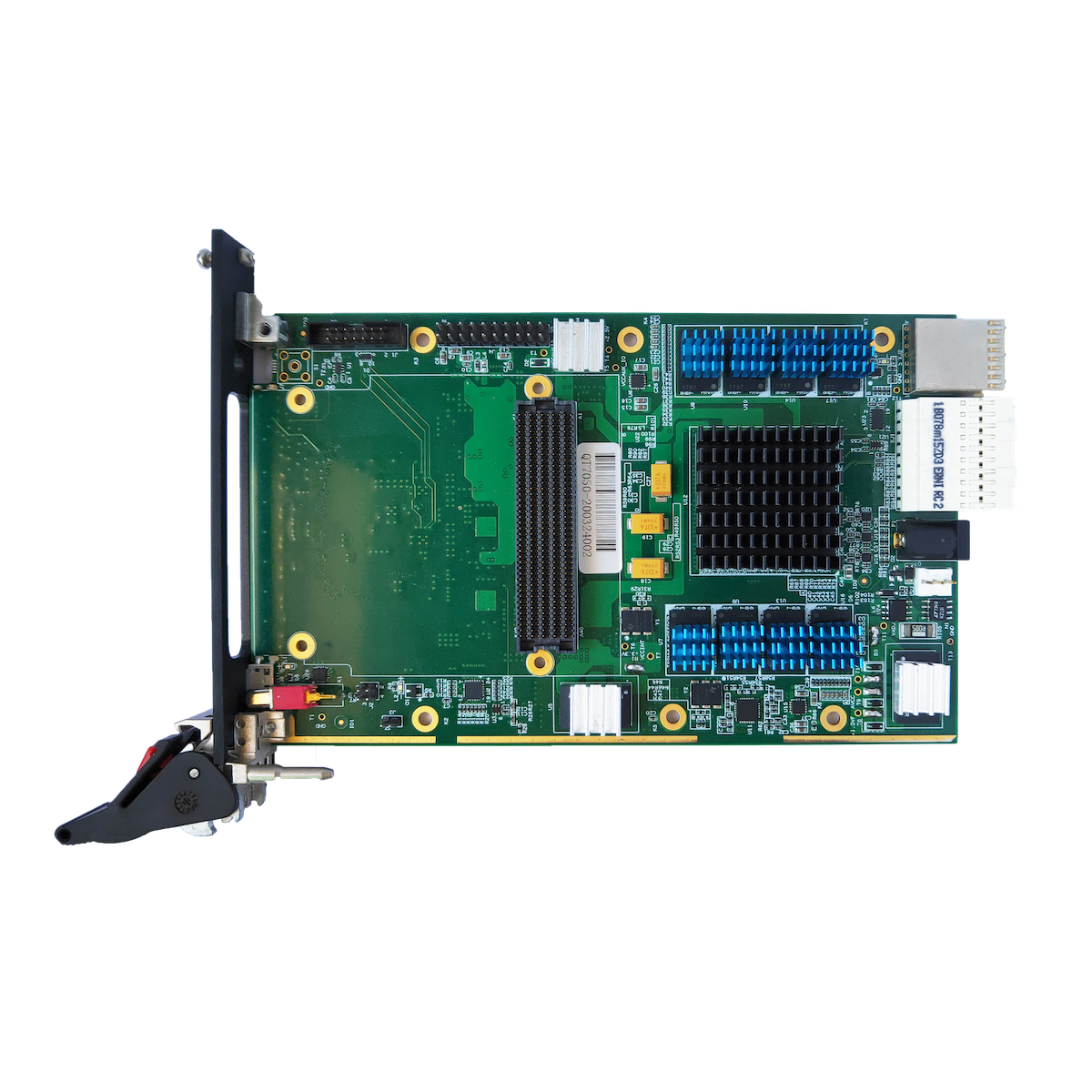
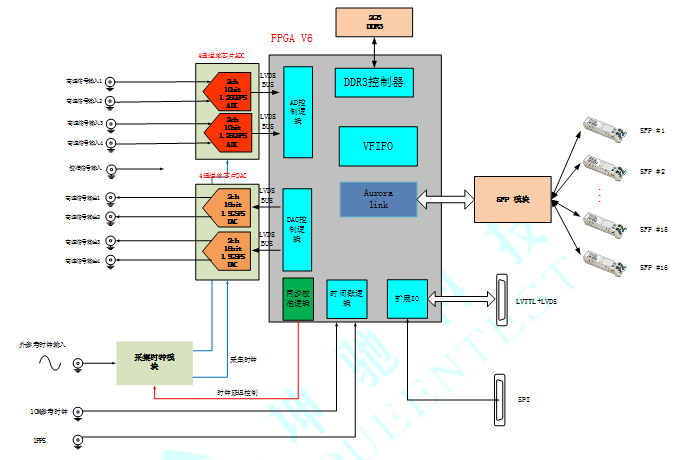
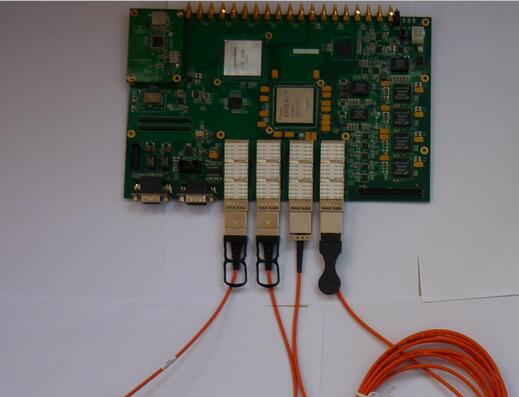
基于光纖接口的超帶寬MIMO通信測試系統(tǒng)可以完成4路寬帶信號收發(fā)(兩對IQ信號)測試,并進(jìn)行基于FPGA的實(shí)時(shí)數(shù)據(jù)處理的目的。其中AD通道采樣率為10bit,1.25GS/s, DA通道為14bit, 1.5GS/s,。
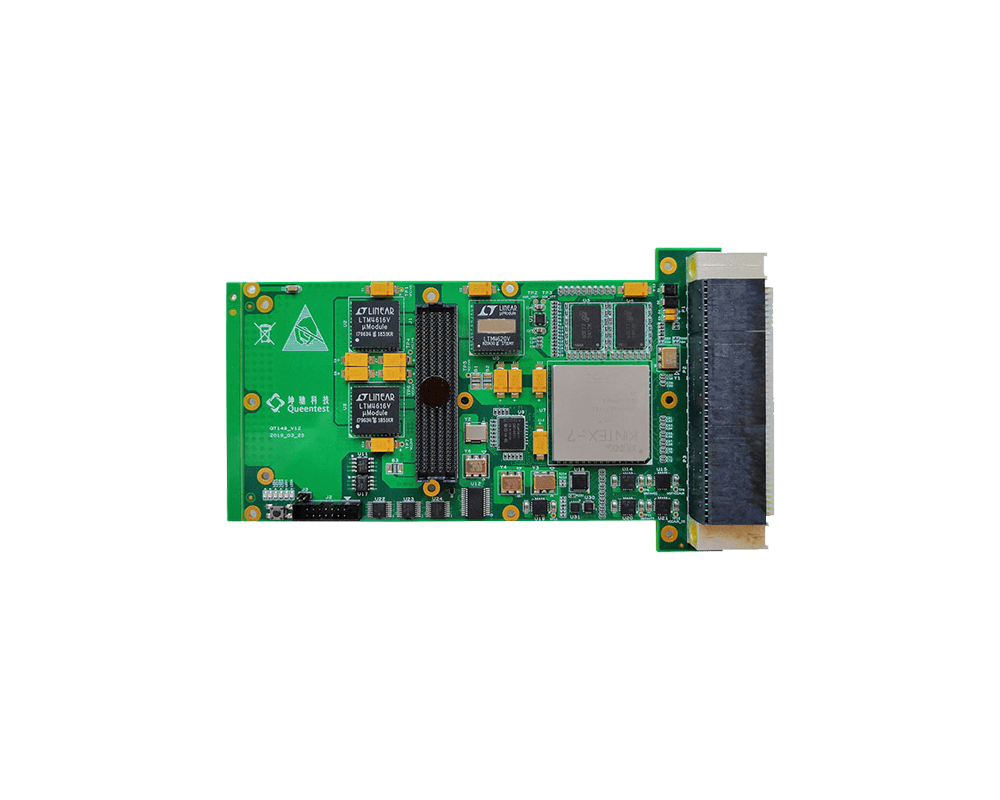
采集模板規(guī)格:
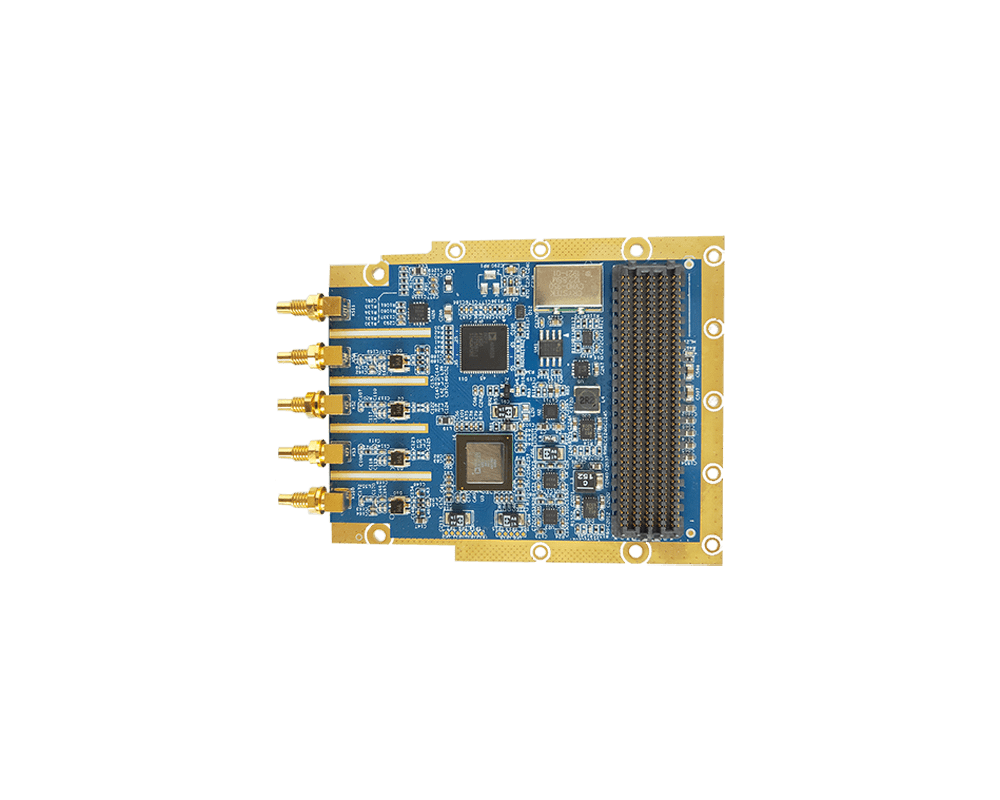
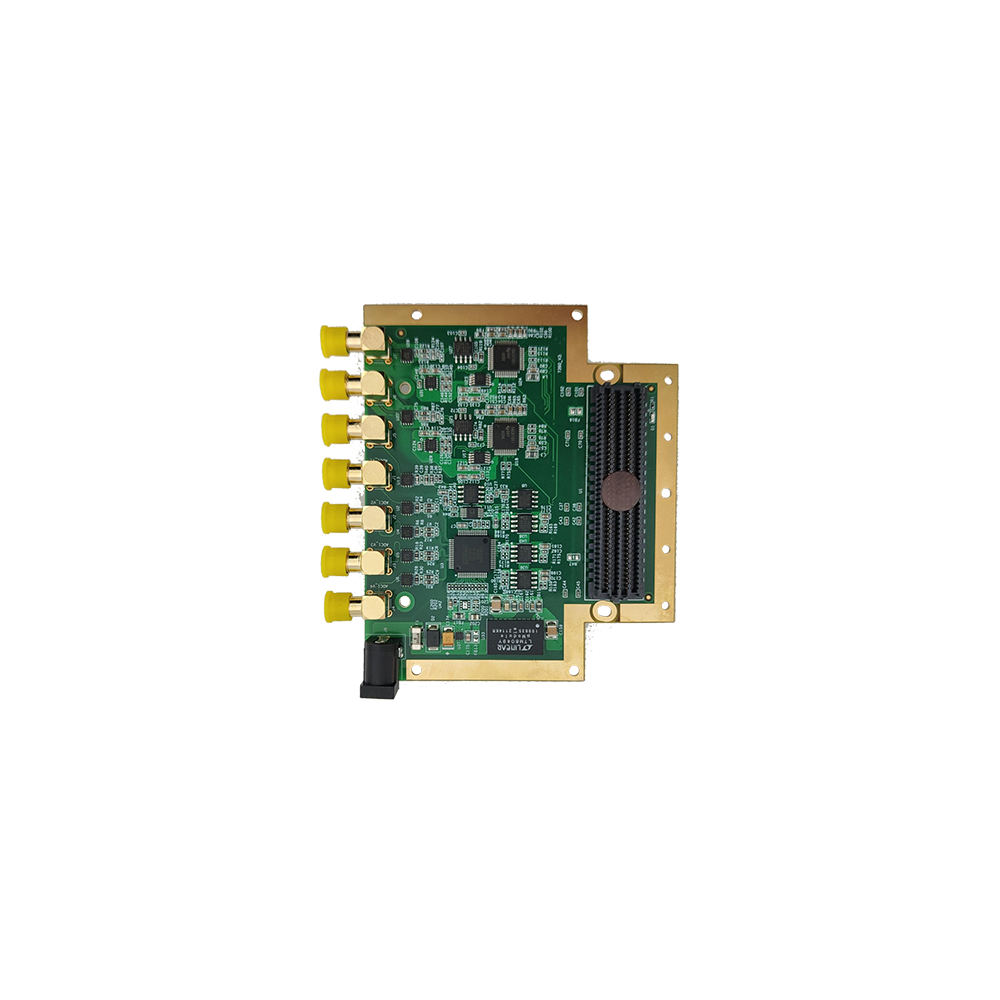
每個(gè)模塊集成4通道10bit 1.25GSPS ADC采集。
同時(shí)支持兩對IQ信號輸入,采用交流差分藕合輸入方式,。
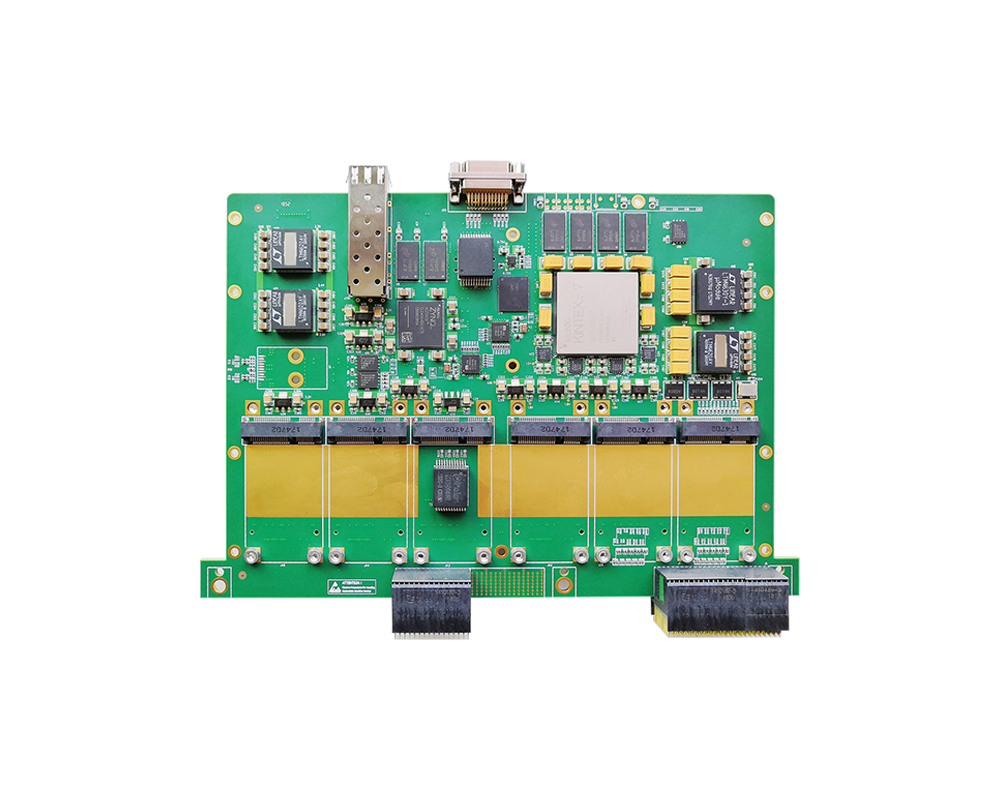
同步模板規(guī)格:
同步采集校準(zhǔn)系統(tǒng)。
統(tǒng)一的基準(zhǔn)時(shí)鐘和觸發(fā)信號分發(fā),。
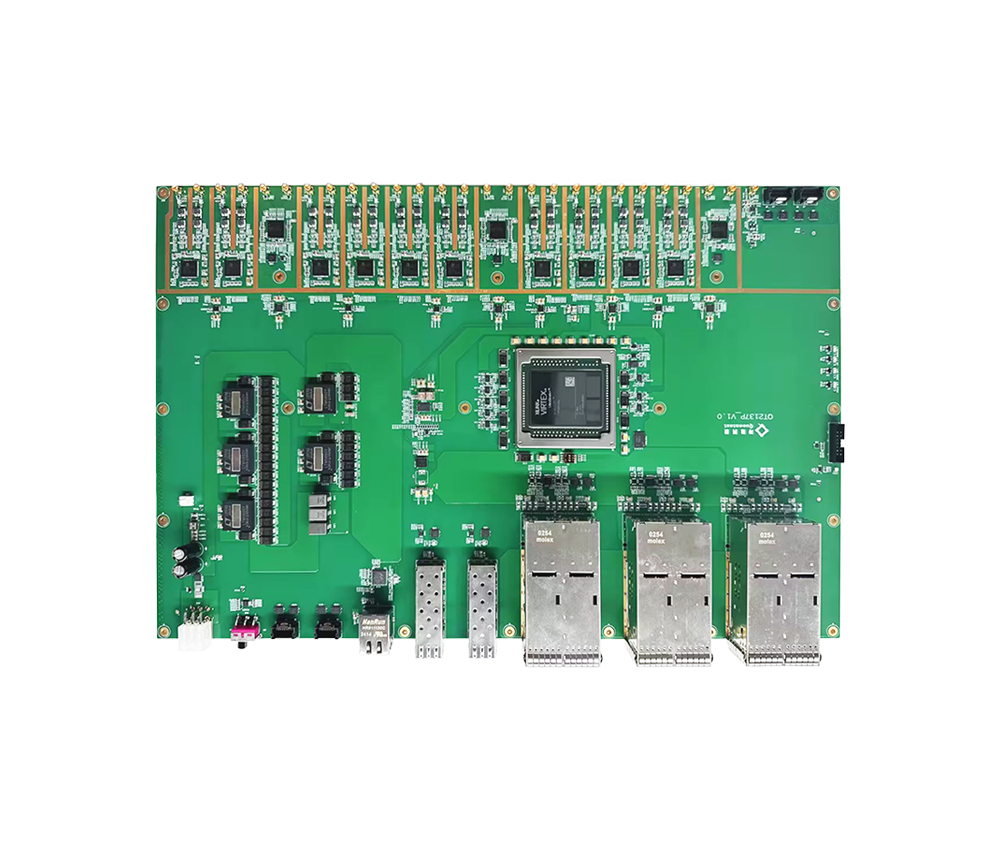
采集模板實(shí)現(xiàn)框圖如下:
ADC規(guī)格如下:
ADC型號:EV10AQ190A
ADC輸出位數(shù):10bit,,4通道采樣率1.25GSPS
模擬帶寬:LF~2GHz
輸入阻抗:100歐(差分),AC藕合
輸入形式:SMA,,差分輸入
滿量程輸入幅度:500mVpp
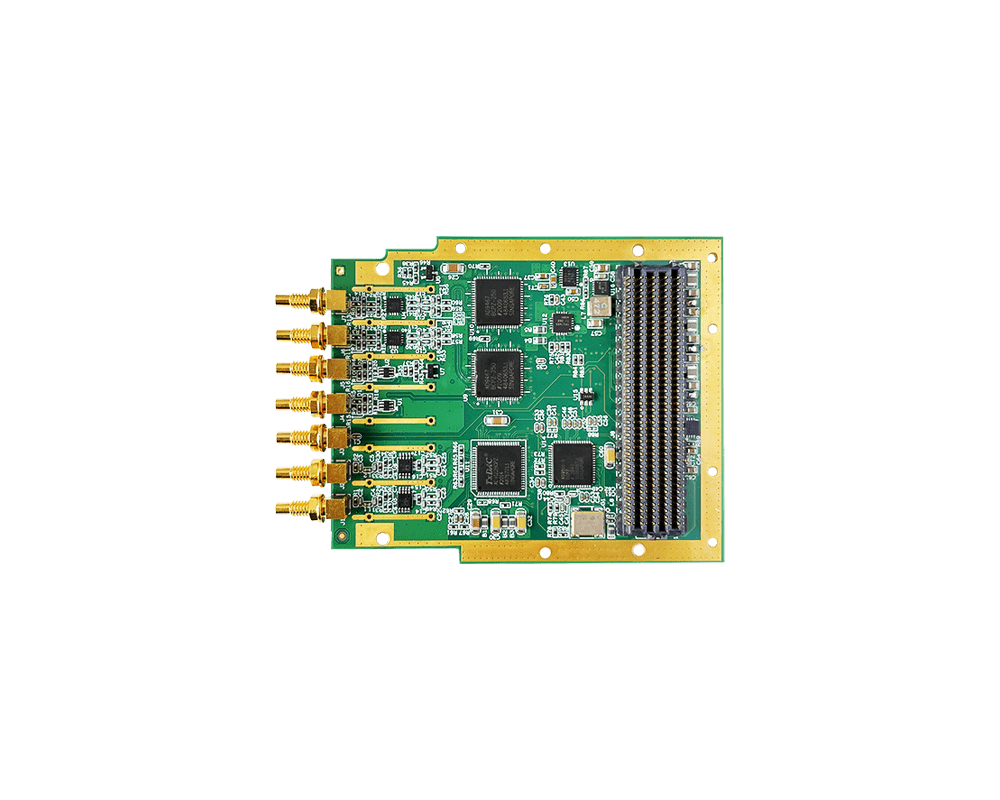
DAC規(guī)格如下:
DAC型號:DAC34SH84
DAC輸出位數(shù):16bit,,4通道采樣率1.5GSPS
輸出阻抗:100歐(差分端),AC藕合
輸入形式:SMA,,差分輸出
滿量程輸出幅度:500mVpp(單端),,1Vpp(差分)
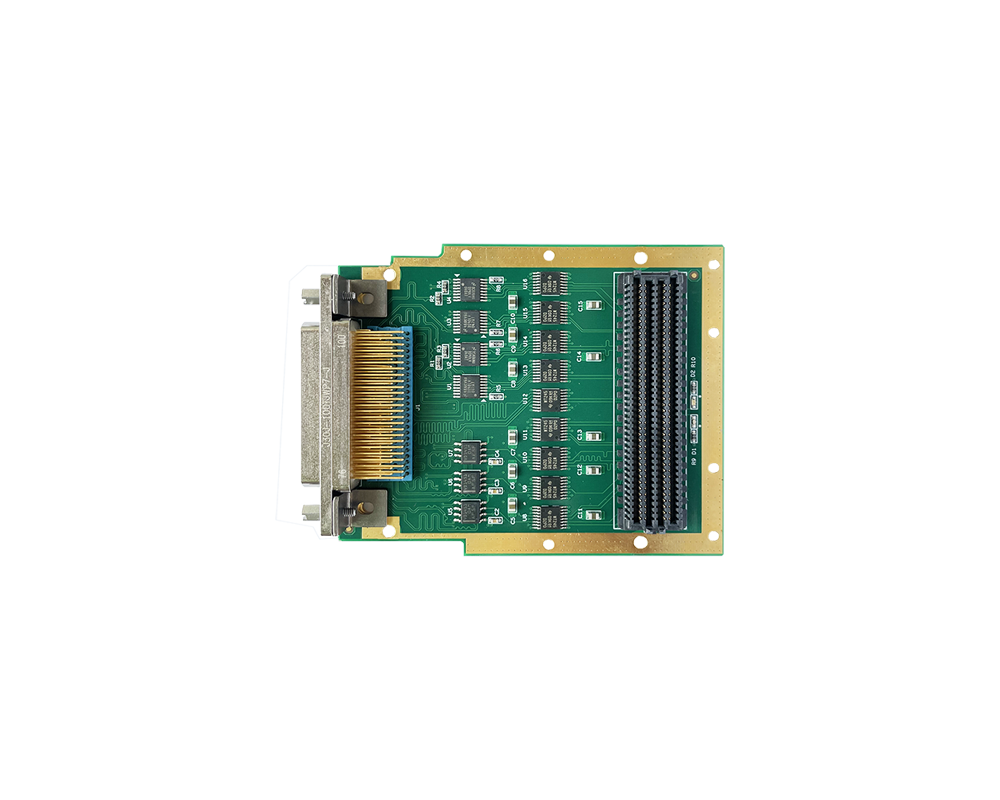
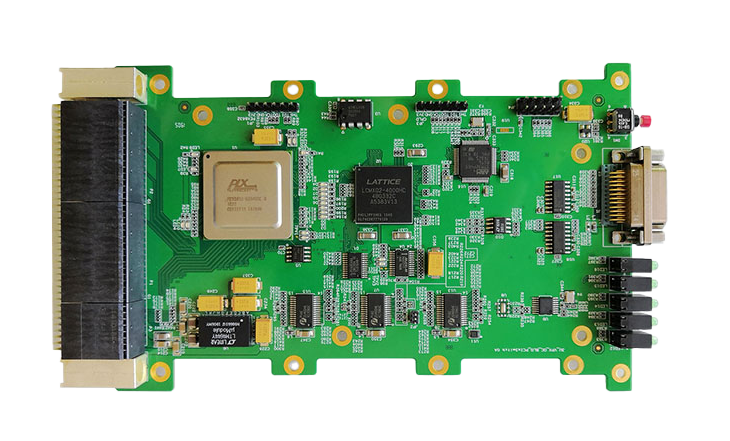
具有同步觸發(fā)和外參考時(shí)鐘輸入的采集時(shí)鐘模塊:
該模塊為單獨(dú)一個(gè)PCB子板,,可以方便更換。當(dāng)更換為不同VCO型號時(shí),,可以支持靈活的輸出采樣時(shí)鐘,,覆蓋2.5GHz~到1080MHz(時(shí)鐘時(shí)采樣率的2倍)。
擴(kuò)展IO:
1.DIO
17個(gè)
兼容2.5V LVTTL和LVCMOS
連接器:單排2.54mm通用連接器,。
排列如下:
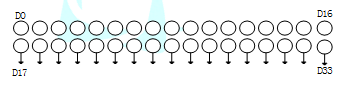
2.高速LVDS輸入輸出
數(shù)量25對
LVDS速度1.25Gbps
連接器:高密度連接器帶連接電纜

3.SPI接口
定義為4線SPI,,S_CLK、S_DIN,、S_DOUT,、S_EN。
3.3V TTL電平,。
連接器:8pin 2.54mm連接器,。
4.狀態(tài)LED
4個(gè)LED直接連接到FPGA上用于顯示。
同步模塊:
產(chǎn)生同步四個(gè)采集模塊的基準(zhǔn)時(shí)鐘和同步信號
同步校準(zhǔn)信號發(fā)生

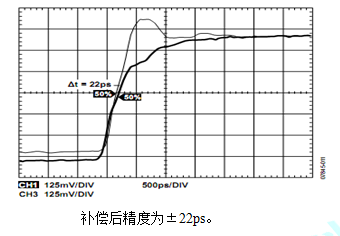
通過自動調(diào)節(jié)芯片內(nèi)部的延遲來達(dá)到輸出時(shí)鐘和參考時(shí)鐘的相位一致性,。
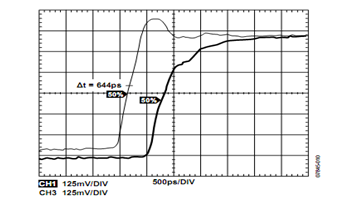
沒有進(jìn)行zero delay補(bǔ)償?shù)臅r(shí)鐘輸入/輸出相位誤差約為664ps,,這個(gè)誤差是一個(gè)范圍,可能在0-644ps中隨機(jī)出現(xiàn),!經(jīng)過zero delay補(bǔ)償?shù)南辔徽`差如下圖:
關(guān)于秒脈沖同步控制:
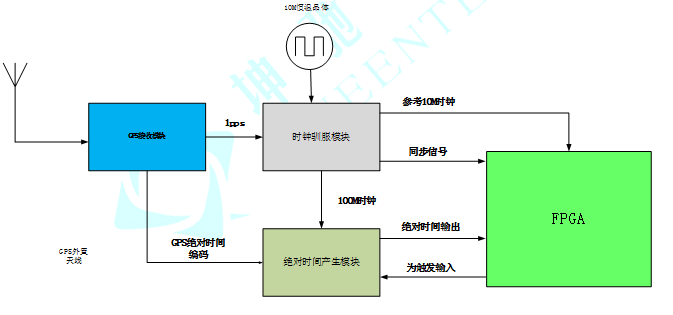
GPS同步模塊由以下部分組成:
GPS接收模塊:輸出1pps秒脈沖
本機(jī)恒溫晶體:輸出10MHz
時(shí)鐘馴服模塊:根據(jù)GPS輸出的1pps信號,,同步每個(gè)采集模塊的本地恒溫晶體;同時(shí)產(chǎn)生1s頻率的
同步時(shí)鐘信號,。
保障在GPS衛(wèi)星短時(shí)間失鎖情況下仍然能維持同步穩(wěn)定
采集間模塊同步機(jī)制:
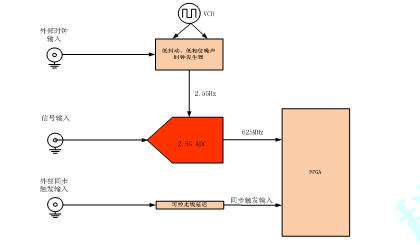
同步原理如下圖所示:
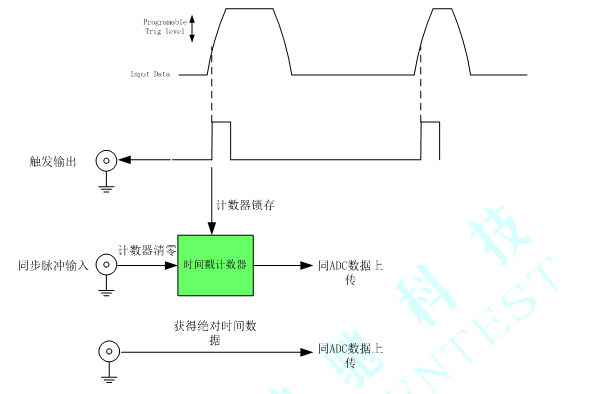
同步機(jī)制在采集模塊FPGA內(nèi)實(shí)現(xiàn),采用兩種方式實(shí)現(xiàn)同步:
時(shí)間戳模式:驅(qū)動時(shí)鐘為采集時(shí)鐘,,頻率1.25GHz,,FPGA2/4分頻處理,當(dāng)有觸發(fā)事件時(shí),,鎖存時(shí)間戳計(jì)數(shù)器,,將該計(jì)數(shù)器值同ADC數(shù)據(jù)值上傳服務(wù)器。GPS同步模塊輸出的同步脈沖負(fù)責(zé)每秒為計(jì)數(shù)器清除一次,,保證各個(gè)采集模塊的計(jì)數(shù)器同步,。如果各個(gè)采集模塊是同時(shí)滿足觸發(fā)條件的,此時(shí)各個(gè)通道的計(jì)數(shù)器值應(yīng)該相等,。
絕對時(shí)間記錄模式:觸發(fā)脈沖輸出到GPS絕對時(shí)間計(jì)數(shù)器中,;當(dāng)絕對時(shí)間計(jì)數(shù)器檢測到上升沿,鎖定絕對時(shí)間計(jì)數(shù)器,,然后通過總線形式讀取當(dāng)前時(shí)間,,同ADC采集數(shù)據(jù)上傳主機(jī)。
-

QT12225
支持交流耦合與雙極性寬帶信號發(fā)生的高精度數(shù)據(jù)發(fā)生卡和回放卡,;14位精度,;雙通道2.5GS/s DA更新率,;全功率模擬帶寬(-3 dB)1.2GHz
-
QTS12509RF-射頻采集存儲系統(tǒng)
收發(fā)信號頻率范圍75MHz~6GHz 支持2KHz~200MHz不同帶寬的信號實(shí)時(shí)記錄 2GB/s持續(xù)流盤速率
-
QT7136AC-FMC AD卡
1/2/4 路 14 位的 A/D 通道;全功率模擬 -3dB 輸入帶寬可達(dá) 2GHz
-
QT7151-FMC AD卡
8 路 16 位 250MS/s 的 A/D 通道,;全功率模擬輸入帶寬最高可達(dá) 900MHz

